Neue Version von myP v1.2.3 wird veröffentlicht. Die neuere Version enthält mehrere Updates, um die Qualität der Software zu verbessern.
- new “Settings” menu allows to change some myP related settings for improved usability
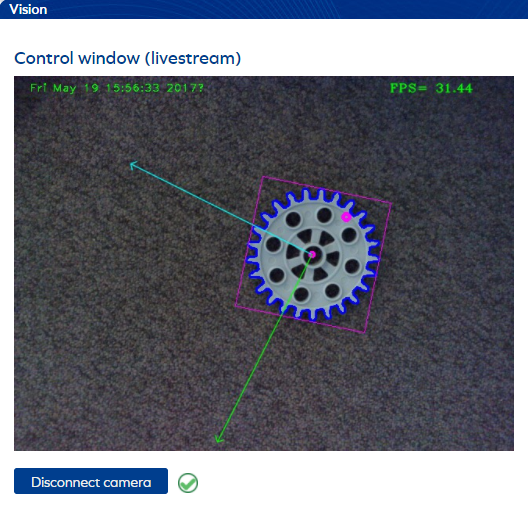
- new “Vision” menu allows to see a live stream of the gripper camera and test/tune the available computer vision functions
- new “Grids” editor allows to create grids (up to three-dimensional) of points to simplify array handling applications
- Calibration uses integrated light barriers instead of hard mechanical limits. This allows for higher calibration speed and increasing absolute positional precision
- New Windows and Window Features
- A new settings window allows for the user to actively selecting some basic myP settings such as start-up settings and collision detection behaviour, which previously have been set upon customer request only.
- A new vision window (replacing the old one) is now integrated within the main myP GUI. This window shows the live stream of a connected camera module and allows to see and distinguish features in the image using available vision functions like contour detection, color segmentation or face recognition.
- New Collision Behaviour
- The new behaviour “Pause and Approve” pauses the application upon collision and requests a confirmation from the user in order to continue with the running application.
- The new behaviour “Stop and Release” stops the application upon collision and puts the robot in release mode, where its joints are manually movable.